NPTEL Advanced Robotics Week 9 Assignment Answers 2025
1. To prove the stability of a system using the Lyapunov method, we have to propose a
- Potential Energy function
- Kinetic energy function
- Total energy function
- Either kinetic energy or potential energy function
Answer :- For Answers Click Here
2. If f(x) is an energy function then f(x) has continuous first partial derivative and f(x)>0 for all x
except at
- f(x)≥0
- f(x)≤0
- f(x)<0
- none of the above
Answer :-
3. To prove the stability of a system where V(x) = 0 we use the
- LaSalles’s theorem or Lyapunov’s theorem
- Lyapunov’s theorem
- LaSalles’s theorem
- Midpoint theorem
Answer :-
4.
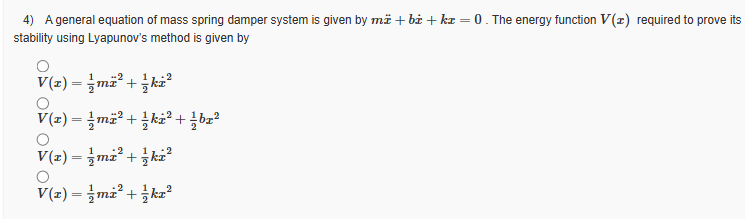
Answer :-
5. If the characteristic equation is given by a0s8+a1s7+a2s6+a3s5+a4s4+a5s3+a6s2+a7s+a8=0, the second row of Roulth table is given by
- a0a2a4a6
- a1a3a5a7
- a0a2a4a6a8
- a1a3a5
Answer :-
6. In a two input control system for a robot link, the combined transfer function is obtained by
- Superposition assuming each input to be zero respectively
- Superposition assuming each input to be unity respectively
- Considering only the higher input value
- root mean square value of the input signals
Answer :- For Answers Click Here
7. The torque produced by the motor that considers the dynamics of the DC motor is proportional to
- square of armature current
- armature current
- square root of armature current
- voltage drop across the motor times the square of the armature current
Answer :-
8. The total voltage acting in an armature controlled DC motor is given by
- applied voltage + back e.m.f voltage
- applied voltage
- back e.m.f voltage
- applied voltage – back e.m.f voltage
Answer :-
9. The two inputs in the control of a single joint robot
- torque due to dynamic effect and applied current
- torque due to motor inertia and applied current
- torque due to dynamic effect and applied voltage
- torque due to motor inertia and applied voltage
Answer :-
10. The dynamic effect(disturbances) in a fast moving robot arm are reduced by
- gear ratio
- harmonic oscillator
- Introducing an inductor in the circuit
- decreasing the stiffness of spring
Answer :- For Answers Click Here