NPTEL Advanced Robotics Week 3 Assignment Answers 2025
1. A PUMA robot is shown below. The frames have been assigned. The first
row of the DH table (in the order of: α, a, d, θ) is given by
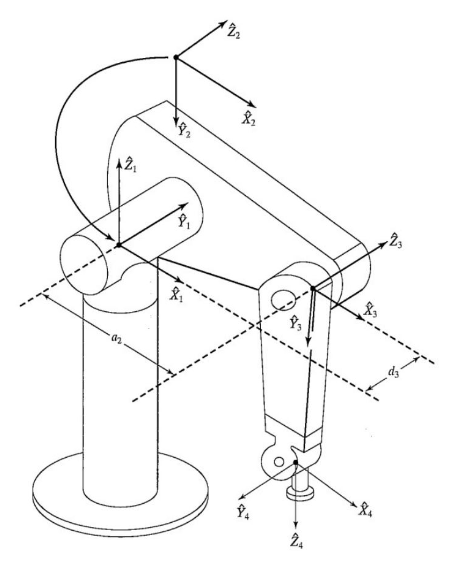
- -90, 0, 0, θ2
- 0, 0, 0, θ1
- 90, 0, 0, θ1
- 0, 0, 0, θ2
Answer :- For Answers Click Here
2. Given the joint angles and link parameters, finding the position and orientation of the last frame is
- Forward kinematics
- Inverse kinematics
- Forward dynamics
- Inverse dynamics
Answer :-
3. In the 6 DOF PUMA robot the last three axes are:
- planar
- parallel
- orthogonal and intersect at a point
- not intersecting
Answer :-
4. For the 2 DOF (2R) planar manipulator shown below, the coordinate (x,y)
is given by
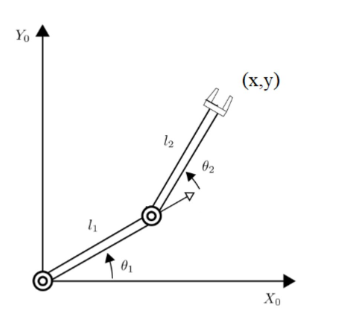
- l1cosθ1+l2cosθ2,l1sinθ1+l2sinθ2
- l1cosθ1+l2cos(θ1+θ2),l1sinθ1+l2sin(θ1+θ2)
- l1sinθ1+l2sinθ2,l1cosθ1+l2cosθ2
- l1sinθ1+l2sin(θ1+θ2),l1cosθ1+l2cos(θ1+θ2)
Answer :-
5. Inverse Kinematics is defined as given the position and orientation of the
end effector or last frame find the
- position and orientation of the remaining frames
- joint angles/lengths
- joint rates
- joint positions
Answer :-
6. The workspace where the end effector can reach in all orientations is called
- Planar workspace
- Reachable workspace
- Dexterous workspace
- All of the above
Answer :- For Answers Click Here
7. For the 2 DOF planar manipulator shown in Q4, for a given (x,y) how many solutions are generally possible (in the center of the workspace)
- 1
- 2
- 3
- 4
Answer :-
8. The function Atan2 computes the tan inverse using only
- +sin, +cos values
- -sin, -cos values
- +sin, -cos values
- -sin, +cos values
Answer :-
9. For the 2 DOF (2R) planar robot arm given in Q4, the position of the end
effector (x,y) is given by (1.8315,0.74), link lengths l1 = l 2 = 1 unit. Find the
value of θ2
- 13
- 15
- 18
- 21
Answer :-
10. For the problem given in Q9, find the value of θ1
- 13
- 15
- 18
- 21
Answer :- For Answers Click Here