NPTEL Advanced Robotics Week 3 Assignment Answers 2025
1. A PUMA robot is shown below. The frames have been assigned. The first row of the DH table (in the order of: α, a, d, θ) is given by:
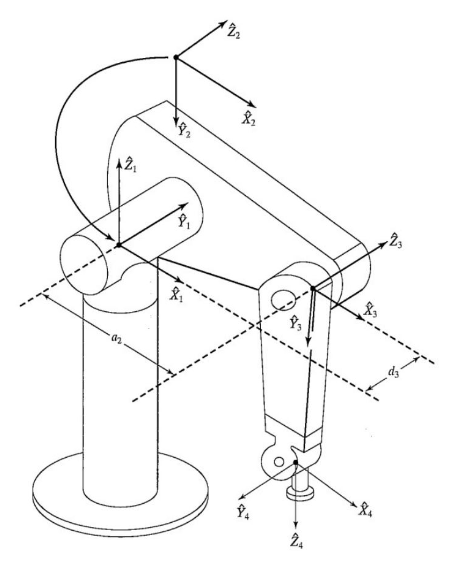
a. -90, 0, 0, θ2
b. 0, 0, 0, θ1
c. 90, 0, 0, θ1
d. 0, 0, 0, θ2
Answer: b
Explanation: The first row of the DH parameters corresponds to the first joint. Since the base link is usually aligned along z0 and x0 is perpendicular to z0 and aligned to z1, the standard configuration for PUMA has the first row with α = 0, a = 0, d = 0, θ = θ1.
2. Given the joint angles and link parameters, finding the position and orientation of the last frame is:
a. Forward kinematics
b. Inverse kinematics
c. Forward dynamics
d. Inverse dynamics
Answer: a
Explanation: Forward kinematics computes the position and orientation of the end effector using known joint angles and link lengths.
3. In the 6 DOF PUMA robot, the last three axes are:
a. planar
b. parallel
c. orthogonal and intersect at a point
d. not intersecting
Answer: c
Explanation: In industrial robots like PUMA, the wrist configuration (last three joints) is typically spherical, meaning the axes are orthogonal and intersect at a single point, enabling easier orientation control.
[tutor_course id=”25278, 25384″ exclude_ids=”” category=”” orderby=”ID” order=”DESC” count=”6″]
4. For the 2 DOF (2R) planar manipulator shown below, the coordinate (x, y) is given by:
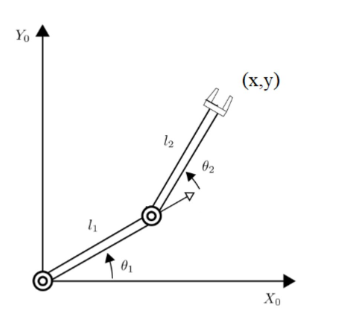
a. l₁cosθ₁ + l₂cosθ₂, l₁sinθ₁ + l₂sinθ₂
b. l₁cosθ₁ + l₂cos(θ₁ + θ₂), l₁sinθ₁ + l₂sin(θ₁ + θ₂)
c. l₁sinθ₁ + l₂sinθ₂, l₁cosθ₁ + l₂cosθ₂
d. l₁sinθ₁ + l₂sin(θ₁ + θ₂), l₁cosθ₁ + l₂cos(θ₁ + θ₂)
Answer: b
Explanation: For a planar manipulator, the position is calculated cumulatively from each link. The angle of the second link adds to the first, hence θ₁ + θ₂.
5. Inverse Kinematics is defined as given the position and orientation of the end effector or last frame, find the:
a. position and orientation of the remaining frames
b. joint angles/lengths
c. joint rates
d. joint positions
Answer: b
Explanation: Inverse kinematics determines the joint variables required to place the end-effector at a specific pose.
6. The workspace where the end effector can reach in all orientations is called:
a. Planar workspace
b. Reachable workspace
c. Dexterous workspace
d. All of the above
Answer: c
Explanation: Dexterous workspace is a subset of the reachable workspace where the end-effector can achieve all orientations at each point.
7. For the 2 DOF planar manipulator shown in Q4, for a given (x, y), how many solutions are generally possible (in the center of the workspace)?
a. 1
b. 2
c. 3
d. 4
Answer: b
Explanation: Generally, there are two possible configurations: elbow-up and elbow-down positions for the same end-effector location.
8. The function Atan2 computes the tan inverse using only:
a. +sin, +cos values
b. -sin, -cos values
c. +sin, -cos values
d. -sin, +cos values
Answer: a
Explanation: atan2(y, x) uses the signs of both inputs to determine the correct quadrant of the result, effectively handling positive values of sine and cosine together to get a correct angle.
9. For the 2 DOF (2R) planar robot arm given in Q4, the position of the end effector (x, y) is given by (1.8315, 0.74), link lengths l₁ = l₂ = 1 unit. Find the value of θ₂:
a. 13°
b. 15°
c. 18°
d. 21°
Answer: c
Explanation: By using the law of cosines on the triangle formed by the links and target point, θ₂ can be calculated. Based on the values given, θ₂ ≈ 18°.
10. For the problem given in Q9, find the value of θ₁:
a. 13°
b. 15°
c. 18°
d. 21°
Answer: a
Explanation: Once θ₂ is known, θ₁ can be found using geometric or trigonometric relationships. Based on calculations, θ₁ ≈ 13°.