NPTEL Advanced Robotics Week 2 Assignment Answers 2025
1. As per the DH notation the axis of rotation or translation of a robot joint is the
- X axis
- Y axis
- Z axis
- All three of these are possible
Answer :- For Answers Click Here
2. The parameter in the DH table for link angle is
- θ
- a
- α
- d
Answer :-
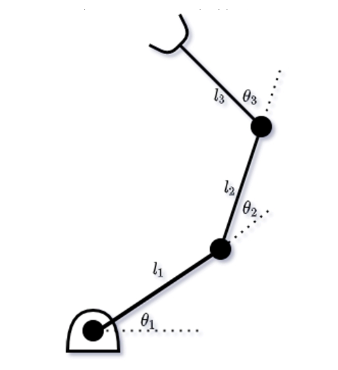
3. In the three DOF (3R) planer manipulator shown below, the second row
of the DH table is given by
- 0, 0, 0, θ1
- 0, 0, θ1, 0
- 0, 0, θ2, 0
- l1, 0, 0, θ2
Answer :-
4. For the manipulator shown in Q3, the third row of the DH table is given
by
- l2, 0, 0, θ3
- l2, 0, 0, θ2
- l1, 0, 0, θ1
- l1, 0, 0, θ2
Answer :-
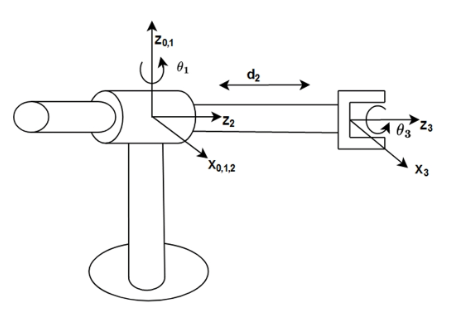
5. In the 3DOF (2RP) manipulator shown below, the first row of the DH table
is (origin of axes 0,1,2 may be taken at the same point)
- 0, 90, d2, 0
- 0, −90, d2, 0
- 0, 0, 0, θ1
- 0, 90, 0, θ1
Answer :-
6. For the manipulator shown in Q3, the coordinates of the origin of frame 2
is given by
- l1 cos θ1, l1 sin θ1, 0
- l1 cos θ1 + l2 cos θ2, l1 sin θ1 + l2 sin θ2, 0
- l1 cos θ1 + l2 cos (θ1 + θ2), l1 sin θ1 + l2 sin (θ1 + θ2), 0
- l1 cos θ1 +l2 cos (θ1 + θ2)+l3 cos (θ1 + θ2 + θ3), l1 sin θ1 +l2 sin (θ1 + θ2)+
l3 sin (θ1 + θ2 + θ3), 0
Answer :- For Answers Click Here
7. For the manipulator shown in Q3, the coordinates of the origin of frame 1
is given by
- l1 cos θ1 + l2 cos θ2 + l3 cos θ3, l1 sin θ1 + l2 sin θ2 + l3 sin θ3, 0
- l1 cos θ1 + l2 cos θ2, l1 sin θ1 + l2 sin θ2, 0
- 0, 0, 0
- l1 cos θ1, l1 sin θ1, 0
Answer :-
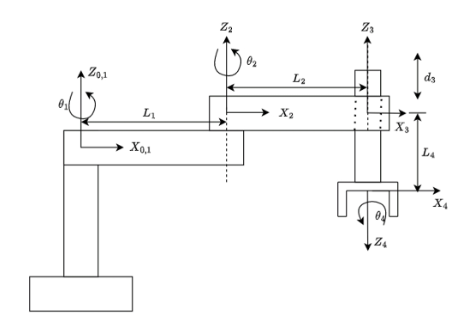
8. For the SCARA robot shown below, the second row of the DH table is given by (the origin of frame 0 and 1 may be taken at the same point)
- L2, 0, 0, θ2
- L1, 0, 0, θ2
- L2, 0, d3, 0
- L1, 0, 0, θ1 + θ2
Answer :-
9. For the SCARA robot shown in Q8, the third row of the DH table is given
by
- L2, 0, 0, θ2
- L4, 0, 0, θ2
- L4, 0, d3, 0
- L2, 0, d3, 0
Answer :-
10. For the SCARA robot shown in Q8, the fourth row of the DH table is
given by
- 0, 180o, L4, θ4
- 0, 0o, L4, θ4
- L4, 180o, 0, θ4
- L4, 0o, 0, θ4
Answer :- For Answers Click Here