NPTEL Advanced Robotics Week 6 Assignment Answers 2025
1. Inertia tensor matrix represents
- Distribution of force of a rigid body relative to a reference frame
- Distribution of mass of a rigid body relative to one another
- Distribution of mass of a rigid body relative to a reference frame
- Angular momentum of a rigid body
Answer :- For Answers Click Here
2. In the Newton-Euler method, the outward iterations are used to find
- Moment about the base frame.
- Inertial force of a link.
- Force acting at every joint.
- Torque acting at every joint.
Answer :-
3. In the Newton-Euler method, the inward iterations are used to find
- Inertial force.
- Inertial torque.
- Joint velocities.
- Joint torques.
Answer :-
4. The Newton-Euler method is a
- force-based method.
- energy-based method.
- both force-based and energy-based methods.
- minimum energy criteria method.
Answer :-
5. The Lagrange-Euler method is a
- momentum-based method.
- energy-based method.
- both force-based and momentum-based methods.
- minimum energy criteria method.
Answer :-
6. In the Lagrange-Euler method, a scalar function called the Lagrangian is
formed that is equal to the
- Sum of kinetic energy and potential energy of each link.
- Difference between kinetic energy and potential energy of each link.
- Difference between total energy and potential energy of each link.
- Sum of total energy and potential energy of each link.
Answer :- For Answers Click Here
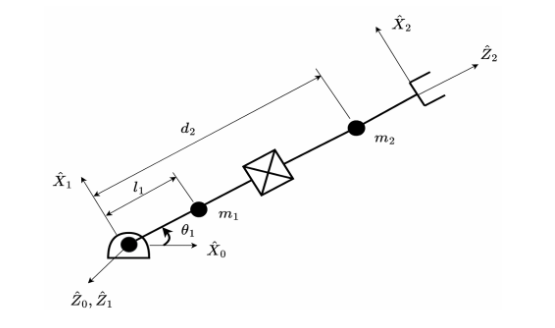
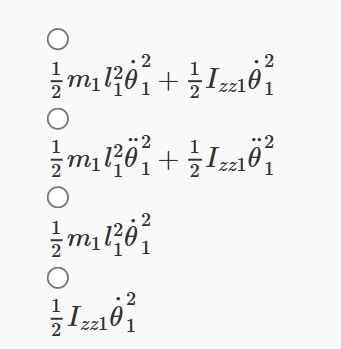
7. A 2 DoFs (RP) is shown below. Using the Lagrange-Euler method find the
kinetic energy of the first link (given Izz1 is the inertia of the first link)
Answer :-
8. The potential energy of the second link in Q7 is (d2max is the maximum travel)
- m2gd2sinθ1
- m2gd2max
- m2gd2maxsinθ1+m2gd2max
- m2gd2sinθ1+m2gd2max
Answer :-
9. The dynamics equation of a serial manipulator is a
- non-linear de-coupled differential equation.
- linear coupled differential equation.
- non-linear coupled differential equation.
- linear de-coupled differential equation.
Answer :-
10. The dynamics equation is made up of
- inertia, coriolis, centrifugal, gravitational terms only.
- coriolis, centrifugal, gravitational terms only.
- inertia,centrifugal, gravitational terms only.
- inertia, coriolis, centrifugal terms only.
Answer :- For Answers Click Here